当世界其它地区还在谈论自动驾驶汽车时,美国宇航局(NASA)最近就将一辆自动驾驶车在另一星球登陆!2021年2月18日,2020火星任务将毅力号(Perseverance)火星漫游车安全运送到火星表面。全世界都在观看毅力号进入火星大气层、降落并最终着陆,尽管观看的影像并非是实时的。
进入、降落、着陆的过程 (称为EDL)是全自主的。当时在该火星漫游车发送传送信息和任务控制接收信号之间的延迟约11分钟。
以前的任务也面临着相同的挑战,前往火星的所有任务中只有约40%成功着陆。就凭这一点就证明毅力号是成功的,更令人惊讶的是该火星漫游车是首个在降落过程中主动完成导航的任务。它使用了一个为2020火星任务开发的新系统:地形相对导航(Terrain-Relative Navigation)。
图片来源:NASA / JPL-Caltech
以前的任务使用进入火星大气层之前收集的数据来确定着陆的位置。估计误差高达3公里,这意味着以前的火星漫游车不得不花几天甚至几周的时间才能从着陆点到达具有科学意义的区域。这也意味着以前选择的着陆区并不是出于科学意义,而是因为它们提供了相对平稳的着陆。试图让一辆“盲目的(blindfolded)”火星漫游车着陆实在太困难了,内载技术使用现有的传感器也不能补偿。使用图像传感器提供着陆的实时视频,使降落不再盲目。
借助“地形相对导航”技术将大不一样。这意味着火星漫游车现在可瞄准更具挑战性的着陆区,因为它可更好地控制其实际降落的位置。这就是NASA能让毅力号在Jezero Crater着陆的方式。这也意味着未来的火星漫游车将更自由,可降落在它们想要降落的位置,而不仅是它们可到达的地方。
该火星漫游车导航到地面的方式是拍摄地形图像并将其与车内存储的图像库进行比较。识别图像中的地标,并将其用于导向和导航。然后,EDL系统可用其已知位置来查询另一个地图区域库,以导航到其目的地。如果确定不在预期的位置,甚至可在下降过程中调整位置。
这是火星任务技术的一项巨大进步,由基于图像传感器的相机赋能,这些图像传感器都是商用现货(COTS)元器件。使用COTS技术是NASA战略的一部分。
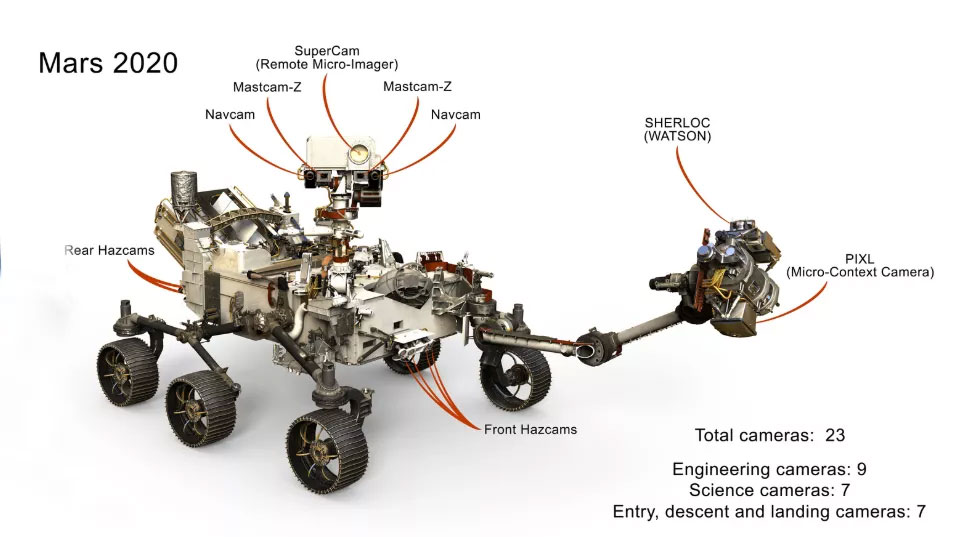
毅力号共有23只摄像机,其中19只装在该火星漫游车上,其中16只供其在地面上时使用。其余的7只摄像机,同时装在该火星漫游车和顶部飞行器上,主要用于支持旅程的EDL阶段。在这7只摄像机中,有6只采用了安森美半导体提供的图像传感器。
来自这些摄像机中的一些录像已被浏览了几百万次。Nasa提供了该任务的EDL阶段的录像。3只摄像机中的降落伞仰视摄像机(PUC)降落伞纯粹用于观察降落时降落伞的打开。所提供的信息和情报将影响未来的任务。降落伞展开后,PUC摄像机以75 帧/秒 (fps)的速度运行约35秒,然后在下降的其余时间切换到30 fps。另外两只摄像机分别称为漫游车仰视摄像机(RUC)和漫游车俯视摄像机(RDC),提供了类似的信息,并且在整个EDL期间都以30 fps的速度运行。
PUC、RUC和RDC中使用的传感器是PYTHON1300,它是130万像素、1/2 英寸 CMOS图像传感器,具有1280 x 1024像素。在“恐怖7分钟”中,所有3只摄像机共拍摄了超过27,000张图像。
现在位于火星上的第6个安森美半导体图像传感器是PYTHON5000,这是个530万像素的图像传感器,占位1英寸,像素阵列为2592 x 2048像素。该传感器用在着陆器视觉系统(Lander Vision System)中,称为LCAM。该摄像机的视场为90°x 90°,并为车载地图“地形相对导航”定位系统提供输入。
如果没有这些摄像机或其中的图像传感器,那么毅力号就不可能准确地着陆。过去的成功体现这些摄像机或其中的图像传感器的性能。可以说,如果没有摄像机,那么地形相对导航系统就不能运行,且NASA能用摄像机探索火星的全新区域。该区域可能提供火星上微生物生活的证据,这是任何人都可庆祝的,无论是否参与某种程度的任务。
